
360도 트레드밀(Omni-directional treadmill)은 사용자가 원하는 방향으로 자유롭게 보행할 수 있다. 반면 통상적으로 러닝머신이라 불리는 일반적인 트레드밀은 1차원(단방향)으로만 보행 운동을 지원한다.
보행 속도나 방향을 실시간으로 파악해 사용자의 위치를 기준 위치에 계속 유지할 수 있도록 해 메타버스에서 구현된 공간을 물리적으로 인터페이스 할 수 있다.
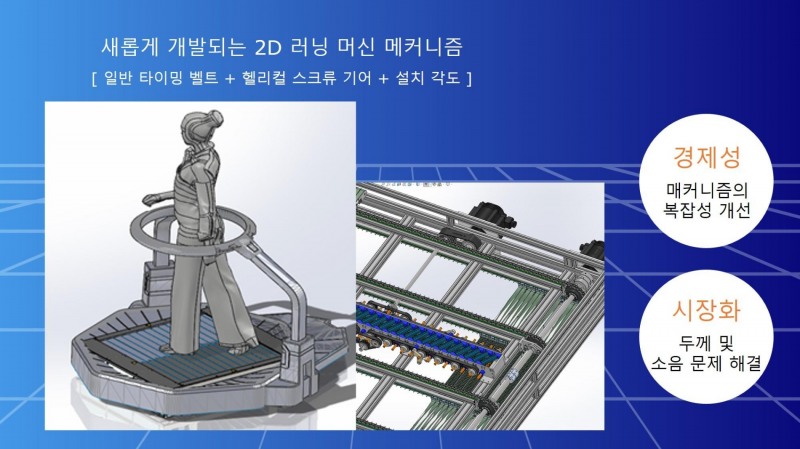
현재 개발된 360도 트레드밀이 가지고 있는 과도한 두께 및 소음 문제를 전반적으로 해결할 수 있도록 연속으로 배치된 특수한 스크류 기어를 2단으로 적층해 고속·고가감속의 2차원 무한지면 구현에 성공했다.
윤정원 교수 연구팀은 모션 성능(3.5m/s, 3.5m/s2)을 확보하면서 가정에서도 쉽게 설치가 가능하도록 25cm 정도의 두께에서도 기존 개발된 360도 트레드밀의 문제점을 해결할 수 있는 새로운 전동 메커니즘과, 안정적인 보행 인터페이스가 가능한 발목 관절 토크 예측 기반의 보행 인터페이스용 제어 알고리즘을 개발했다.


